|
Vor dem
Genuss dieses Artikels diese
Bastelei bitte durchlesen:
4-0-5
Schrittmotortreiber
erkunden
Und dann den Nachfolgeartikel: 4-0-5-b Schrittmotortreiber mit Chopper So,
nachdem jetzt ein wenig
Verständnis vorhanden ist und die Experten
ein paar Daten
bezüglich der möglichen Drehzahlen gesehen
haben, können
wir hiermit diesem Artikel fortfahren:
Viele Leser berichten mit, dass sie die Platine an einen PC anschließen möchten. Das aber ist oft in vielen Fällen nicht nötig und oftmals verbraucht der PC auh unnötig Strom, wenn der Schrittmotor beispielsweise nur ab und zu in Bewegung ist, der PC aber dennoch durchlaufen muss. Daher gehen die Gadanken vielleicht in die Richtung, dass an die Platine ein Microcontroller angeschlaossen sein soll und die Platine damit dann unabhängig vom PC wird. Das kann der Fall sein, wenn beispielsweise ein Futterautomat in einem Stallgebäude betrieben werden soll, oder vielleicht in einem Labor etwas selbstständig dosiert werden muss. Dann würde die Platine ja selbstständig den Schrittmotor antreiben, ohne dass nach der Programmierung ein PC nötig wäre. Man kann die Platine dann in ein hermetisch dichtes Gehäuse einbauen und sie auch in verschmutzter Umgebung betreiben. Nun aber erstmal der Plan, wie wir ihn nun schon kennen, wenn wir die oben genannten Artikel gelesen haben: 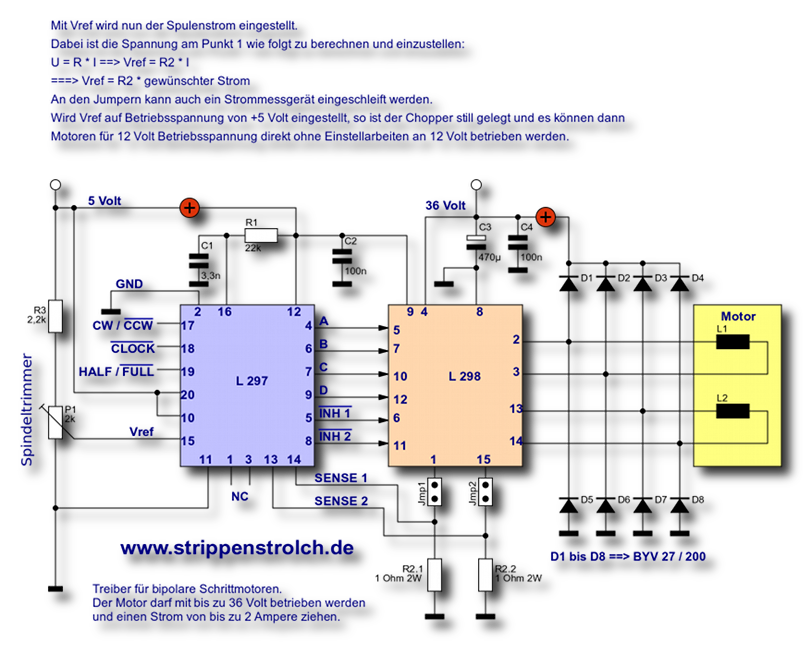 Hier heißt es
jetzt ==>
Welche Picaxe nehme ich dafür ? Wie baue ich die Picaxe dort dran ? Es gibt hier
in Deutschland einen
Händler für die Picaxes:
www.roboter-teile.de
Dort
sehen wir, dass die
Picaxe 20M angeboten wird. Dieser
Mikrocontroller hat 8 Eingänge
und 8 Ausgänge. Nach einem Blick auf den
Schaltplan sehen wir,
dass wir aber für den Betrieb des
Schrittmotortreibers nur 3
Ausgänge der Picaxe belegen müssen.
Das
sind "CW / nicht-CCW", "nicht
CLOCK" und "HALF / nicht FULL"
Es
bleiben uns also noch 5
Ausgänge übrig, von denen wir zwei
mit je einer Kontroll-LED
belegen und die restlichen drei
belegen wir mit jeweils einer
kleinen
Relais-Schaltstufe.
Wir sehen auch, dass alle 8 Eingänge frei sind. Jetzt müssen wir überlegen, dass ja jeder Anwender etwas anderes mit diesen Eingängen abfragt und das Ergebnis jeweils anders in der Picaxe verarbeitet. Daher wäre es zu überlegen, die Eingänge einfach offen herauszuführen. Dies aber bedingt dann später weider eine neue, zusätzliche Platine, die dann vielleicht noch Pull-Up- oder Pull-Down-Widerstände beinhaltet, oder aber es muss noch ein Spannungsteiler für einen Sensor vorgeschaltet werden. Hier können wir dem User ein wenig unter die Arme greifen, indem wir die Pull-Up- und Pull-Down-Widerstände gleich mit auf die Platine draufplanen und dann per Jumper auswählbar machen. Somit wäre es dann zumindest möglich, ganz einfache Taster als Eingabegeräte anzuschließen und dann jeweils einen der Widerstände per Jumper hinzuzuwählen. Dann würde die Platine nach außen hin nur die Taster enthalten und der Rest würde kompakt in einem staubdichten Gehäuse Platz finden können. Diese einfachen Taster könnten z.B. in der Landwirtschaft sogar aus APFR-Tastern bestehen und können somit sehr haltbar sein. Die Relaisausgänge hingegen könnten auf herkömmliche Lampen geführt werden und auch hier könnte dann "derbes" APFR-Material Verwendung finden. OK, haben wir also die Rahmenbedingungen für die Adaptierung einer Picaxe gefunden:
==>
Muss auf eine Europakarte passen.
Mit dem SUB-D-Verbinder wäre es dann also für geschickte Programmierer sogar möglich, Zustände der Platine oder Teilzustände einer kleinen Anlage auf dem PC zu visualisieren. Es wäre dann weiterhin möglich, den Schrittmotor vom PC aus fernzusteuern oder in Steuerungs- und Regelprozesse vom PC aus einzugreifen. Auch Datenlogging wäre mit der Karte möglich. Damit wäre dann alles gesagt und es kann also der Schaltplan folgen, der dieses Pflichtenheft erfüllt. Zunächst die bereits bekannte Schaltung, an die die Picaxe adaptiert werden soll. Hier werden einfach die nötigen Pins mit einer Zahlenkennung erweitert, denn sonst wird der Schaltplan für die Homepage-Ansicht zu groß: (Blog aktuell an dieser Stelle in Arbeit)  Achtung ! Induktion & Abwärme !
 Wenn Du einen Jumper ziehst, oder
den Motor
abklemmst, während die Spannung noch
anliegt, kommt es in den
Motorspulen zu hohen
Selbstinduktionsspitzen, die den L298
beschädigen können, da die Freilaufdioden
in diesem Fall
nicht richtig wirken können ! Wenn Du einen Jumper ziehst, oder
den Motor
abklemmst, während die Spannung noch
anliegt, kommt es in den
Motorspulen zu hohen
Selbstinduktionsspitzen, die den L298
beschädigen können, da die Freilaufdioden
in diesem Fall
nicht richtig wirken können !
Danke für die Aufmerksamkeit,  |
|
|