So. Da haben wir aber nun tüchtig aufgeräumt.
Das sieht doch schon mal gut aus, damit kann man
basteln.
Nun habe ich mal
nachgelesen und gesehen, dass man sehr schnelle Dioden
benutzen soll.
Also
so richtig schnelle
Dioden...
Mist !
Die habe ich nicht liegen !
Also nehme ich frecherweise einfach die 1 N 4007 , die
jeder Bastler zu 100 Stück in der Bastelkiste liegen
haben sollte ( ist wirklich eine extrem billige Diode,
jedoch für Gleichrichterschaltungen so um die 100
Hertz gedacht, 1000 Volt Sperrspannung, 1 Ampere ).
Egal, ich nehme die also einfach und stecke sie in
mein Board. Alle anderen Bauteilwerte habe ich liegen
und stecke sie auch
so, wie angegeben. Bei den Elkos ist darauf
zu achten, dass wir von vornherein Typen für 35 Volt
auswählen, um die Basteleien in anderen Artikeln
mitmachen zu können.
So. Aha. Hmm...
Mal weiter gucken...
Da ist noch der CW / CCW -
Eingang. Das ist Englisch und heißt "clockwise" bzw. "counterclockwise".
Zu Deutsch "im
Uhrzeigersinn / gegen den Uhrzeigersinn". Den
Eingang beschalte ich noch gar nicht, denn für den
ersten Versuch ist es egal, wie herum der Motor dreht.
Später kann hier direkt ein Controller oder
TTL-Schaltungen angeschlossen werden.
So, was ist da noch ?
---> "CLOCK"
Das ist der Takteingang. Den
muss ich wohl oder übel beschalten, sonst läuft der
Motor nicht, denn es ist ja ein Schrittmotor.
Dann gibt es noch "HALF / FULL". Das
ist für Halbschrittbetrieb und Vollschrittbetrieb. Im
Halbschrittbetrieb macht der Motor die doppelte
Schrittanzahl pro Umdrehung.
Ich sehe also:
Ich brauche einen
einfachen Taktgenerator,
um meine Versuche weiter zu führen.
Den baue ich mir
zunächst aus einem CD
4093 Schmitt Trigger nach folgendem "Rezept"
(gleiche gelbe Nummern
können mit dem nächsten Plan weiter
unten verbunden werden) :
Wenn Du das alles auf einem Steckbrett
nachbauen möchtest, so gebe Obacht, es können sich
viele Fehler einschleichen. Billige Steckboards
verursachen auch gern mal ein paar Wackelkontakte,
das sollte man wissen. Bei
Lochrasterplatinen solltest du dir vorher ein
Layout auf Papier malen.
Als Richtwert: Ich als
"original strippenstrolch.de" habe dazu etwa
45 Minuten gebraucht, dann sah es so aus ( Naja,
ok, nebenbei habe ich auch diese Dokumentation auf
Schmierpapier aufgeschrieben und die Fotos
gemacht. Ohne Fotos und Dokumentation ist man in
etwa 15 Minuten fertig. ):
")
So weit so gut.
Jeder Profi weiß jedoch, dass das Drehmoment ( die
"Motorkraft" ) eines Schrittmotors
mit zunehmender Drehzahl, bzw. zunehmender
Schrittfrquenz rapide abnimmt.
Das heißt also, je schneller ich den Motor
drehen lasse, desto "schlapper" wird er.
Schließlich wird er stehen bleiben, auch wenn
gar keine Last dran hängt.
Das probierte
ich aus, indem ich mit dem Poti eine immer höhere
Schrittfrequenz einstellte.
Schließlich lieb der Motor bei erstaunlich
niedriger Drehzahl stehen. Um mal genau zu
sehen, was da passiert, habe ich die
Schrittfrequenz mal gemessen:

Störe
Dich
übrigens
nicht
an den 2,457 Volt, die da angezeigt
werden, ein Multimeter misst stets den Effektivwert
- bitte notfalls den Lehrer dazu befragen
- Natürlich hat das Rechtecksignal eine
Spitzenspannung von 5 Volt und einen
Ruhepegel von Null Volt, wie auch aus dem
kleinen Oszillogramm ganz gut ersichtlich
ist. Ein Kästchen hat hier gerade 4 Volt.
Bei etwa 1,5 Kästchen in der Höhe bekommen
wir so ungefähr 5 Volt Spitzenspannung
heraus.
Ich
stellte eine Drehzahl ein, bei der der
Motor gerade
noch so lief. Der Takteingang
wurde dann mit Impulsen von 1000 Hertz ( 1
kHz ) "gefüttert".
Nun stelle
ich mal probeweise auf Halbschrittbetrieb
um. Der Motor drehte etwa halb so
schnell, so dass ich die
Schrittfrequenz erhöhen konnte. Eigentlich
nicht verwunderlich, jedoch scheint es da
einen linearen Zusammenhang zu geben, denn
es stellten sich 2 kHz ( 2000 Hertz ) als
Taktfrequenz ein, bei der der Motor stehen
blieb:

Mein
Motor hatte im
Vollschrittbetrieb einen
Schrittwinkel von 1,8 °, also 360 /
1,8 = 200 Schritte pro
Umdrehung. Bei 1000 Schritten pro
Sekunde ( 1 kHz ) ergibt sich also
eine Drehzahl von: 1000 / 200 = 5
Umdrehungen pro Sekunde = 5 * 60 = 300
Umdrehungen pro Minute.
Im Halbschrittbetrieb ergab sich ein
Schrittwinkel von 0,9 °, also 360 /
0,9 = 400 Schritte pro Umdrehung. Bei
2000 Schritten pro Sekunde ( 2 kHz )
ergibt sich dann eine Drehzahl von
2000 / 400 = 5 Umdrehungen pro Sekunde
= 5 * 60 = 300 Umdrehungen pro Minute.
Nanu
?
Magie ?
Unerklärliche Quantenphysik ?
Man wird sehen...
Damit man diesen Versuch auch
nachvollziehen kann, benötige ich wohl
einen Schrittmotor aus laufender
Produktion, den jeder einfach
bestellen kann. Auch sollte er noch
bezahlbar sein. Ein "Mittelding" also.
Ich hatte für obigen Versuch ebenfalls
einen Schrittmotor aus Laufender
Produktion benutzt. Den hatte ich mal
bei Nanotec
bestellt , seit dem liegt er herum,
weil keine anständige, günstige
Schrittmotortreiberkarte verfügbar
war. Und ich hatte keine Zeit, eine
zusammenzulöten.
Naja, jetzt habe ich Zeit....
Also hier der Motor von Nanotec,
für den die bisherigen Messergebnisse
aufgetreten sind:

Sieht
gut aus, gut verarbeitet, leider
etwas "schwach auf der Brust".
Ist ja auch nur ein ganz kleiner
Motor. Ein wenig Kupfer muss
wohl schon im Inneren
vorhanden sein, um ein wenig
Kraft entwickeln zu können, ohne
größere "Treibertricks".
Da fiel mir ein, dass ich ja aus
dem Fräsplotterprojekt noch
einige übelste
"Grabbeltischmotoren" liegen
hatte. Also habe ich einen davon
mal getestet:

Hier sieht man auch das billige
Sinterlager.
Ok.
Das Teil also angeklemmt und
gemessen:
Zunächst im Vollschrittbetrieb:

Wir sehen hier
ganz deutlich, warum viele
Basteleien an
"Grabbeltischmotoren"
scheitern. Im Leerlauf (
ohne Last ) betrug bei
diesem Modell nur 197 Hz.
Bei 7,5 ° Schrittwinkel des
Motors eine Drehzahl
von 4,1 Umdrehungem
pro Sekunde, das entspricht
nur 246,25 Umdrehungen pro
Minute bei 197 Hz
Schrittfrequenz. Das ist
zwar fast genau so schnell
wieder Schrittmotor von
Nanotec, aber dafür ist die
Auflösung pro Schritt
wesentlich kleiner.
Nun der Halbschrittbetrieb:

Handoszilloskope
(Conrad Shop)
 Im
Halbschrittbetrieb
liegen wir bei nur 349 Hz
Schrittfrequenz, das wären
dann 218,125 Umdrehungen pro
Minute, wie gesagt bei
völligem Leerlauf, ohne
irgendwelche Last. Bei diesem
Motortyp sehen wir also, dass
die mögliche Drehzahl von der
Art der Ansteuerung abhängig
ist.
Wir sehen beim
"Grabbeltischmotor" z.B. auch,
dass die höchst
mögliche Drehzahl bei
Halbschrittbetrieb und
Vollschrittbetrieb unterschiedlich
ist. Vielleicht ist das ein
Qualitätsmerkmal, von
Schrittmotoren, denn wenn man
später im laufenden Betrieb
von Vollschritt auf
Halbschritt umstellt, soll ja
schließlich das gleiche
Drehmoment auftreten und nicht
etwa Schritte verloren gehen.
Da ist es natürlich stets
angenehm, wenn das Drehmoment
gleich bleibt.
Das sieht man dann auch die
deutliche Qualität des kleinen
Nanotec-Motors.
Nun noch mal schnell zur
Messung des Conrad-Motors:
Die Messungen ergaben nichts
Besonderes:
Auch der Conrad-Motor SM 12056
machte nur bis etwa 1000
Schritten pro Sekunde
mit. Allerdings ist er sehr
viel
kräftiger als die
anderen Motoren, bei einem
"Kompromiss" von 400 Schritten
pro Sekunde ist es nur unter
Anstrengung möglich, die
"nackte" Welle mit den Fingern
festzuhalten obwohl ich ja nur
eine "Bastelsteuerung"
gesteckt hatte.
 Für
Bastelmodelle
mit Spindelantrieb
wird es also mit allen Motoren
und der vorgestellten
Motorsteuerung ein wenig kritisch,
wenn ein schneller
Vorschub erreicht
werden soll.
Es ergibt sich also folgende
Liste:
Nanotec-Motor
---> 1,8 Grad / Schritt,
am kleinsten, gute
Verarbeitung, erstaunlich
viel Kraft bei langsamen
Schritten - Max. 1000
Schritte pro Sekunde
Grabbeltisch-Motor
---> 7,5 Grad / Schritt,
mittelgroß, verliert beim
Erhöhen der Schrittzahl sehr
schnell die Kraft - Max. 350
Schritte pro Sekunde
Conrad-Motor
---> 1,8 Grad / Schritt,
am größten, auch gut
verarbeitet, extrem viel
Karft, genügt sicherlich für
viele Bastelprojekte - Max.
1000 Schritte pro Sekunde
Naja, wie dem auch sei, wir
haben eben also einen
Schrittmotortreiber entworfen,
der
1. Mit 12 Volt und 5
Volt arbeitet (altes
PC-Netzteil)
2. Billige Teile
benutzt (besonders billige
Motoren, wenn man möchte)
3. Überschaubar ist
(einseitige Platine,
Steckbrett, Lochrasterkarte)
Nun "juckt" es mich doch aber,
die Schaltung mal mit den schnellen
Dioden
auszuprobieren, die im
Datenblatt angegeben sind.
Ein Blick in den Conrad-Shop
verriet mir, dass die
geforderten Dioden
BYV 27 / 200 zurzeit
nicht lieferbar sind. Also
habe ich die Dioden
BYV 26 D bestellt.
Die sind sogar noch etwas
billiger, vertragen jedoch nur
einen Strom von 1 Ampere. Bei
meinem Motor, den ich benutzen
möchte, ist das jedoch
noch passend. Auch der oben
vorgeschlagene "Conrad-Motor"
läuft nur mit 0,6 Ampere. Das
sollte also gehen.
Diese Dioden übrigens haben
keinen normalen PN-Übergang,
wie ich aus dem Conrad-Katalog
entnahm. Deshalb sind sie so
schnell.
Warum brauchen wir
eigentlich so schnelle
Dioden ? Wir haben doch
gesehen, dass es mit
"normalen Dioden" auch geht
?
Nun, wenn wir den
Motor mit Taktimpulsen von
bis zu 2000 Hertz
"beliefern", so wird eine
Motorspule 1000 mal in der
Sekunde umgepolt. Dabei muss
sich sich das Magnetfeld der
Spule 1000 mal pro Sekunde
abbauen und anders herum
wieder aufbauen.
Die schnellen Dioden
beschleunigen den Abbau des
Magnetfeldes, so
dass eventuell eine
höhere Drehzahl möglich ist,
wenn wir schnelle Dioden
verwenden.
Außerdem ist der Treiber
eigentlich für den Chopperbetrieb
gedacht, bei dem Frequenzen
bis 20 kHz auftreten können.
Beim Chopperbetrieb wird der
Motor dann mit einer viel höheren Spannung
betrieben und der Chopper,
zu Deutsch "Schneider", zerhackt
den Strom dann so, dass
effektiv trotzdem nur der
gewollte Strom fließt. Das
ganze hängt damit zusammen,
dass Spulen träge sind was
den Stromfluss anbetrifft.
Um den Strom möglichst
schnell in die Spule zu
"quetschen", benötigt man
eben eine höhere Spannung.
Bei Stilltand
des Motors, also ohne
magnetische Gegenkopplung
würde dieser dann aber mit
zu viel Strom durchflossen,
so dass er überhitzen würde.
Der Chopper "zerhackt" das
alles so, dass stets nur der
maximal zulässige Strom
fließen kann. Dafür braucht
man dann auch die SENSE
Widerstände und das
ganze Gedöns.
 In
unserer Karte haben wir aber
den Chopper still gelegt. In
unserer Karte haben wir aber
den Chopper still gelegt.
Also steckte ich jetzt mal die
schnellen Dioden in das
Laborsteckbrett und wiederhole
die Messungen von oben mit dem
Conrad-Motor:
Ergebnis:
Bei dieser
Schrittmotorsteuerung,
ohne Chopper und mit 12 Volt
Spannung ist
es völlig unerheblich,
welche Dioden eingesetzt
werden. Die maximale
Schrittzahl ändert sich
überhaupt nicht, lediglich
konnte eine ganz geringe
Stromzunahme
festgestellt werden, was
natürlich auch eine ganz
gering größere Kraft bedeutet
(Drehmoment).
Ich würde also sagen, es lässt
sich Geld sparen und es können
also ruhig die Dioden 1
N 4007 verbaut
werden, die sind doch extrem
billiger (z.B.
www.pollin.de). Man benötigt
pro Motor immerhin 8 Stück.
Bei einer Drei-Achs-Anwendung
wären das bereits 24 Dioden.
Für
Bastelanwendungen
hast du also die freie Wahl
der Dioden, nur 1 bis 2 Ampere
sollten sie schon vertragen
können.
An
der
hier beschrieben Schaltung
machte der Nanotec-Motor
den besten Eindruck, was aber
nicht heißen soll, dass man
sich unbedingt solch einen
gewiss guten, aber allerdings
verdammt teuren Motor kaufen
sollte. Für viele Anwendungen
genügen auch bereits die
"Grabbeltischmotoren", die es
bei Pollin im Restpostenmarkt
zum absoluten Hammerpreis
gibt. (meist so um die 3-5
Euro)
Ich verwende jedenfalls als
Referenz den oben
vorgeschlagenen Conrad-Motor.
Eine weitere interessante
Adresse ist diese hier: Motionstep
Aber gerade Pollin
hat enorm günstige
Schrittmotoren. Das sind zwar
alles Restposten, aber dafür
gerade richtig, wenn man nur
mal so basteln möchte.
Warum also nicht gleich
mal eine Platine machen ?
So richtig für alle mit Layout
und so ?
Wir haben dabei folgende
Probleme zu beachten:
Besonders die kleinen
Kondensatoren können recht
unterschiedliche Rastermaße
der Anschlussdrähte haben. Da
muss man also vorsorgen, damit
die Kondensatoren später auch
passen, egal, wo sie bestellt
wurden. Auch sollte die
Platine im Bügelverfahren
herstellbar sein. Das heißt,
die Leiterbahnen dürfen nicht
sehr dünn werden und auch
nicht zwischen IC-Beinchen
hindurchgeführt werden. Eine
einseitige Platine ist
selbstverständlich.
Ansonsten dürfte es wohl keine
größeren Probleme geben.
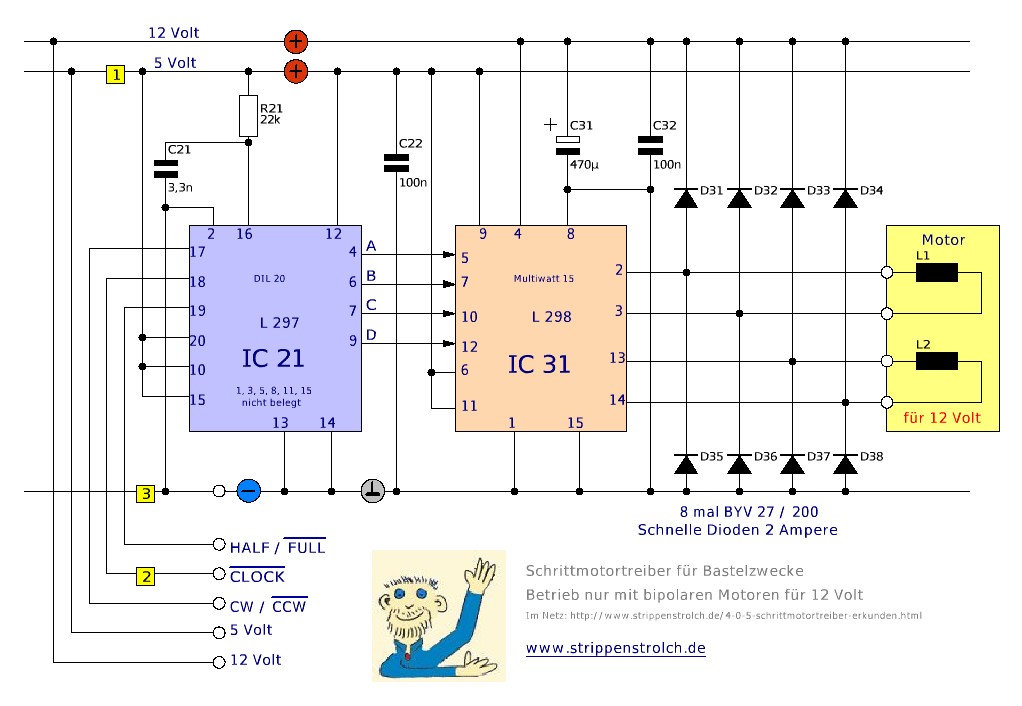
Zunächst folgt also erst
einmal der Schaltplan in
"strippenstrolch.de´scher
Zeichungsart", die gelben
Punkte können mit dem
Taktgeber aus dem Schaltplan
oben verbunden werden.
|



")


 Teppichboden
im
Bastelbereich vermeiden, Schuhe mit
Plastiksohle vermeiden und
Baumwollkleidung tragen, also keine
Kleidung aus Kunstfaser. Wenn wir uns
nicht sicher sind, können wir noch kurz
den Heizkörper
berühren, bevor wir das IC
auspacken. Damit entladen wir uns und die
hohe Spannung an den Fingern ist
verschwunden.
Teppichboden
im
Bastelbereich vermeiden, Schuhe mit
Plastiksohle vermeiden und
Baumwollkleidung tragen, also keine
Kleidung aus Kunstfaser. Wenn wir uns
nicht sicher sind, können wir noch kurz
den Heizkörper
berühren, bevor wir das IC
auspacken. Damit entladen wir uns und die
hohe Spannung an den Fingern ist
verschwunden.
")

")