|
Vor dem
Genuss dieses Artikels diese Bastelei bitte
durchlesen:
4-0-5
Schrittmotortreiber
erkunden
So,
nachdem jetzt ein wenig Verständnis
vorhanden ist und die Experten ein paar
Daten bezüglich der möglichen Drehzahlen
gesehen haben, können wir hiermit diesem
Artikel anfangen:
Viele Leser unter Euch stellen folgende Frage (FAQ): "Ich habe einen Schrittmotor aus
einem alten Drucker ausgeschlachtet und
möchte damit experimentieren."
"Passt deine Platine 9-1-1 dazu ?" Da musste ich bislang stets schreiben: "Nein, leider passt meine Platine nur für motoren, die auch für 12 Volt ausgelegt sind." Jetzt habe ich mich entschlossen, eine Platine zu entwickeln, die auch für die anderen bipolaren Motoren passt. Also setzte ich mich eines Sonntags hin und begann erst einmal, die Schaltung zu stecken: Zunächst erst einmal die beiden ICs L297 und L298 drauf stecken: 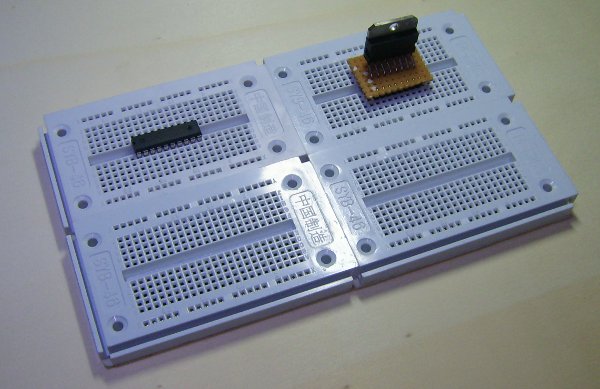 Das kleine Paltinchen haben wir ja im anderen Artikel kennen gelernt. Nun kommen die Dioden hinzu, ich habe ihnen einen eigenen Teilbereich gewidmet: 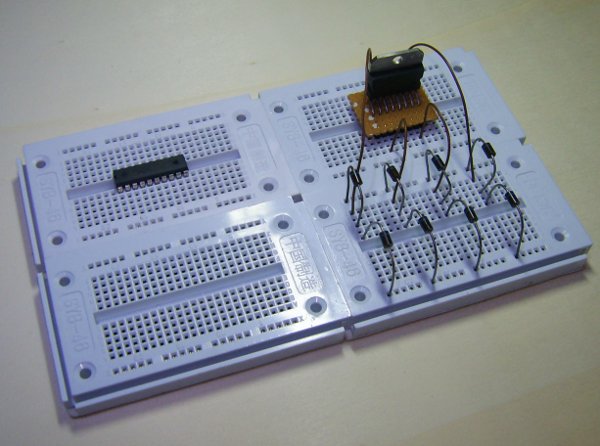 Aber das
kennen wir ja schon, da ist bislang kein
Unterschied zum Vorgängerartikel.
Abernun kommen die beiden
Fühlerwiderstände hinzu
("Sense-Widerstände"). Jede der beiden
Widerstände ist mit einer der Spulen im
Motor in Reihe geschaltet. Dadurch wird
der jeweilige Strom einer Spule durch
den Fühlerwiderstand gezwungen und m an
erhält am Widerstand eine Spannung, die
dem Spulenstrom proportional ist. Aber
zunächst stecken wir diese Widerstände
erst einmal:
 Wie
wir sehen, sind die ersten
Drahtbrücken ebenfalls gesteckt. Die
Sense-Leitungen dürfen natürlich
nicht vertauscht werden...
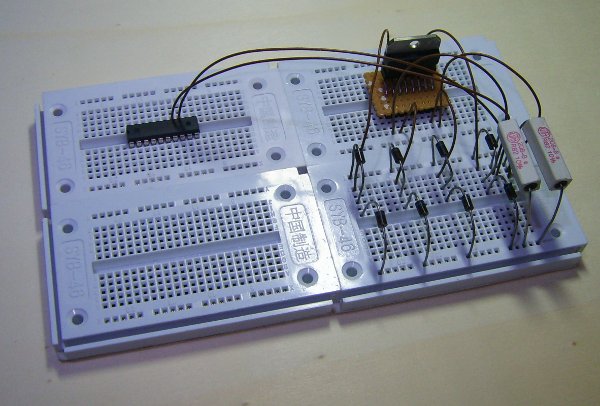
Danach steckte ich den Versuchsaufbau erst einmal fertig: 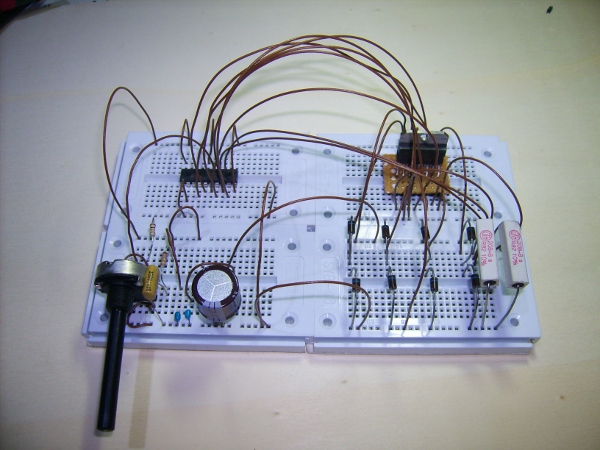 Das
ist dann auch schon alles, wenn
ich alles richtig gemacht habe.
Zu beachten ist hierbei, dass
später recht große
Induktionsströme auftreten
können, und das deshalb der Elko
schön groß gemacht werden muss.
Natürlich darf dann die
Versorgungsspannung des Motors
die zulässige Spannung des
Kondensators nicht
überschreiten. Der kann sonst
mit einem lauten Knall platzen.
zudem ist zu beachten, das hier mit zwei Versorgungsspannung gearbeitet wird:
Nun aber erstmal der Plan: 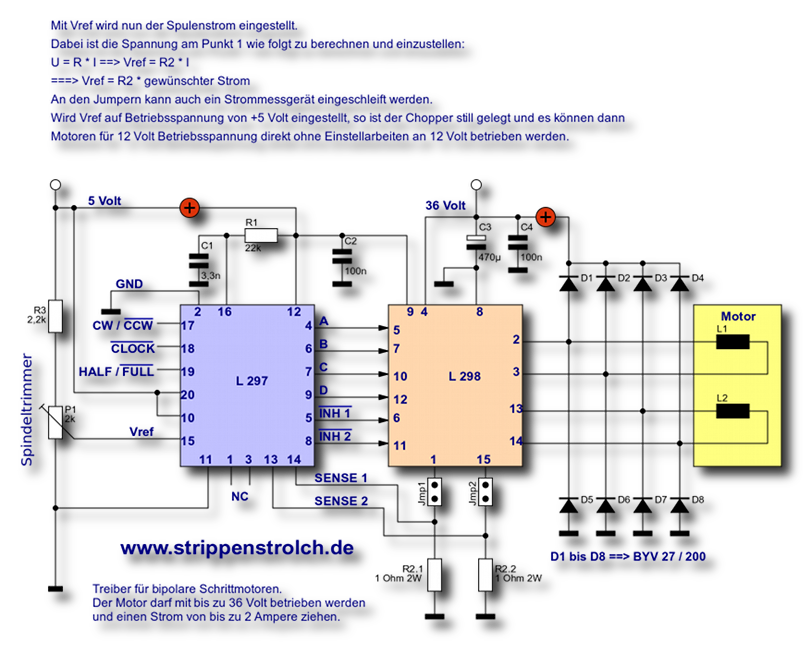 Hier heißt es
jetzt ==> Experimentieren.
Man kann
folgende Fehler machen:
Im Fall der verstauschten Sense-Leitungen lässt sich der Chopper nicht vernünftig einstellen. Die Vertauschten Sense-Leitungen erkennt man daran, dass man den Motorstrom mit dem Poti P1 nicht mehr ganz herunter regeln kann. Wenn die Sense-Leitungen also vertauscht sind, fließt ungefähr immer der gleiche Motorstrom, egal, was man auch am Poti einstellt. In dem folgenden Video ist noch einmal kurz zu sehen, wie die Schaltung mit 27 Volt Motorspannung arbeitet.  Achtung !
Natürlich benötigen der L297 und der L298
auch weiterhin noch eine zweite Spannung
von 5 Volt für die internen Elektroniken ! Achtung !
Natürlich benötigen der L297 und der L298
auch weiterhin noch eine zweite Spannung
von 5 Volt für die internen Elektroniken !
Niemals die 27 Volt auf diese Eingänge legen ! Meine Werkbank sah
dann also so aus:
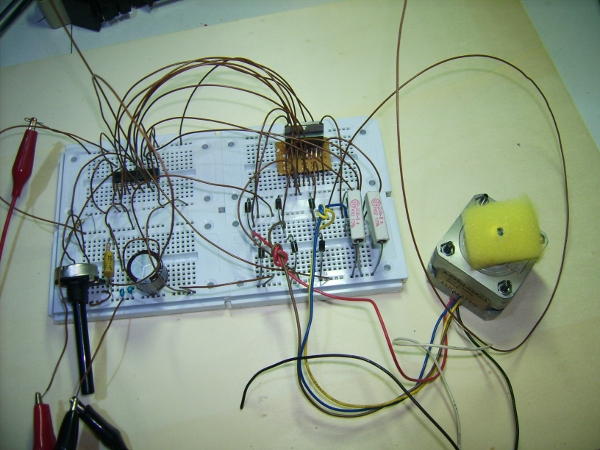 Die beiden Sense-Widerstände R2 (rechts unten auf dem Steckbrett) sollten übrigens nicht größer als 1 Ohm sein und sollten dann für eine Leistung von 2 Watt ausgelegt werden, damit der Chopper gut eingestellt werden kann und die Widerstände nicht zu warm werden. Dieser erste Probemotor war dann aber doch "etwas mickerig". Es sollte also noch ein Versuch mit einem größeren Motor folgen. Dieser "Grabbeltischmotor" hat übrigens auch nicht unbedingt gute Werte, das habe ich schon mit bloßem Auge gesehen. Sehen wir also einmal, wie ein größerer Motor reagieren wird. Dazu holte ich meine Schrittmotor-Kramkiste hervor und suchte einen Motor aus, der für 27 Volt Direktbetrieb überhaupt nicht geeignet ist. Er hat folgendes Typenschild:  Wir
sehen also, dass der Motor eine
Nennspannung von 7,4 Volt hat und mit
1 Ampere betrieben werden soll. wir
können die 7,4 Volt vergessen, denn
wir haben ja den Chopper, der den
Strom auf 1 Ampere regeln soll.
Zuvor sehen wir jedoch unten, dass die Kabel abgeschnitten sind. Da müssen nun erst einmal neue Kabel dran, richtig schön mit Schrumpfschlauch, damit ich mir keinen Kurzschluss einfange. Übrigens hat dieser Motor, so wieder andere auch, 6 Anschlusslitzen. Das ist aber nicht schlimm, zwei der sechs Litzen sind Mittelanzapfungen der Spulen, so dass man den Motor auch alternativ unipolar betreiben könnte. Man kann die Spulen also mit einem Durchgangsprüfer durchpiepsen und die zwei größen Widerstandswerte (evtl. Multimeter) zeigen dann an, auf welchen Litzen die Spulen liegen. Hier sieht man jetzt nur 5 Litzen. Es gibt noch eine rote, die auf dem Foto von der blauen verdeckt ist, also bitte "keine Panik" ... Nun kommen aber erst einmal die Litzenverlängerungen an den Motor gelötet. Nachdem das fertig war, schloss ich den Motor an, drehte die Versorgungsspannung langsam auf 27 Volt hoch und stellte dabei den Chopper auf 2 Ampere im Stillstand des Motors ein. Warum 2 Ampere ? auf dem Typenschild stand doch 1 Ampere ! Nun, wir erinnern uns, wir haben es mit 2 Spulen zu tun, also fließt auch der doppelte Strom. Im Schaltplan sind für diesen Zweck aber extra noch einmal 2 Jumper eingezeichnet, so dass man den exakten Strom auch mit einem Multimeter anstatt mit dem Labornetzteil messen kann. Hier misst man dann aber den einfachen Spulenstrom je nach gezogenem Jumper. Dann sah es auf meiner Werkbank so aus: 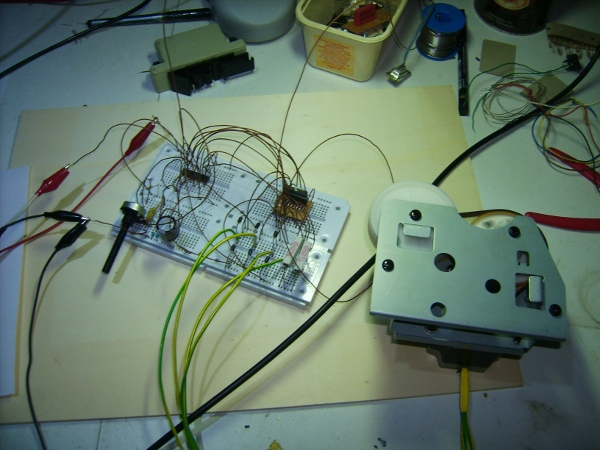 Der
Schrittmotor wird hier von einer
Mechanik mit Zahnrädern und
Zahnriemen verdeckt. Das Ganze
stammt aus einem alten,
ausgeschlachteten Kopierer.
Ich versuchte, den Schrittmotor mit der Hand anzuhalten und hätte mir beinhae böse den Fingergeklemmt. dieser etwas größere Schrittmotor war also schon nicht mehr per Hand anzuhalten, zumal die Zahnräder auch noch untersetzt waren. Die Resonanz bekommt man aber mit geeigneten Schrittzahlen in den Griff. Da muss dann ein wenig experimentiert werden. Man kann dann auch erkennen, dass der Strom trotz Chopper bei Zunahme der Schrittfrequenz irgendwann in die Knie geht. Das ist durch die Induktivitäten in den Spulen bedingt und nicht änderbar. Bei Stillstand jedoch würde dieser 7,4-Volt-Motor durchbrennen. Der Chopper aber verhindert, dass dies geschieht, indem er den Strom herunter regelt. Wie das geschieht, sehen wir jetzt: Nehmen wir einmal an, wir würden eine große Spule (große Induktivität) mit einem Schalter in Reihe schalten und würden dort ein Oszilloskop anschließen: 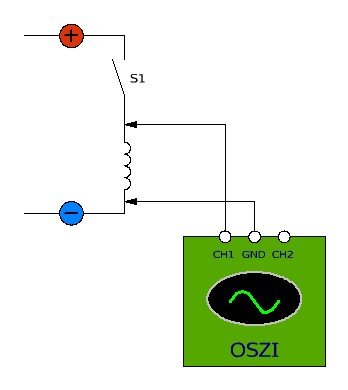 Dann würden wir
feststellen, dass der
Strom nicht sofort in
voller Höhe fließt, wenn
wir den Schalter
einschalten:
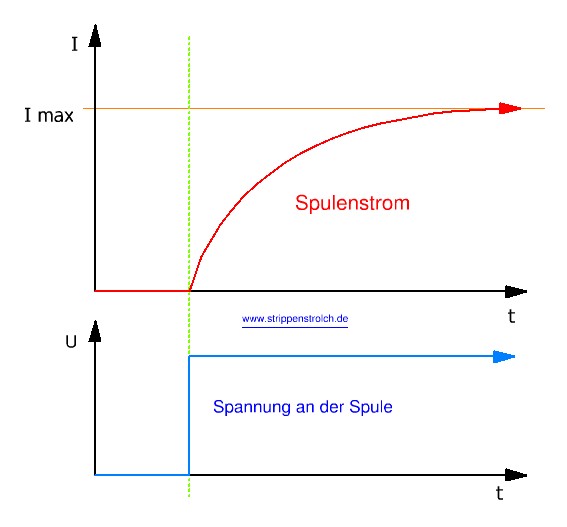 Jetzt kann
man sich folgendes
leicht vorstellen:
Wenn wir den Schalter nun ganz schnell an und aus schalten, so wird der Spulenstrom immer nur gerade anfangen zu fließen und der Schalter wäre bereits schon wieder offen, bevor sich der komplette Spulenstrom aufgebaut hätte: 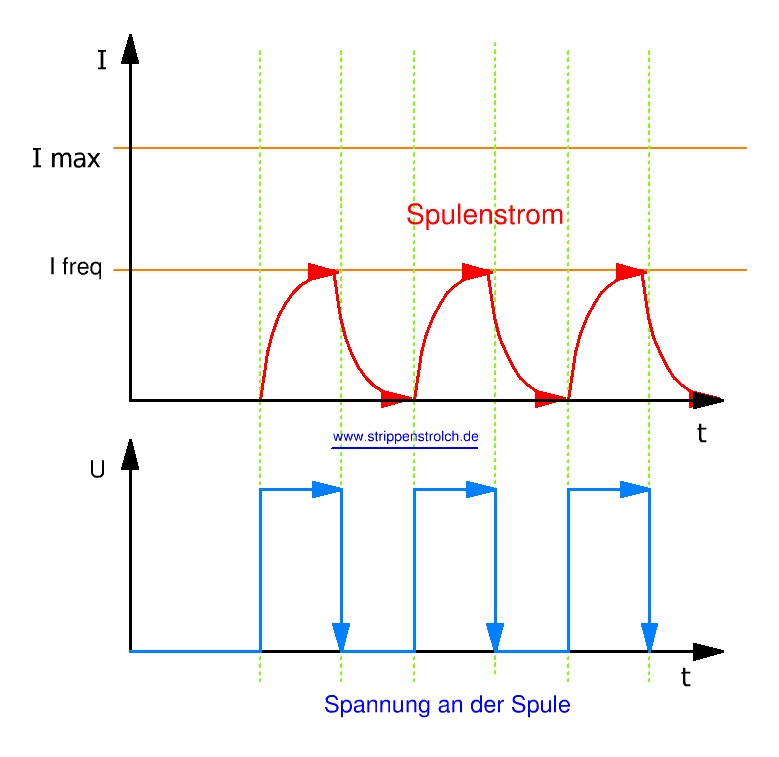 Hier
kann man dann auch
gut verstehen,
warum ein
Schrittmotor mit
höher werdender
Schrittfrequenz
"in die Knie"
gehen muss. Der
resultierende
Spulenstrom wird
immer geringer, je
höher die
Schrittanzahl ist.
Daher kann man
einen Schrittmotor
nicht beliebig
schnell drehen
lassen.
Warum
aber nun dieser
"Chopper" ?
(vergl. engl: "to chop" ==> zerhacken) Nun,
um nun bei
höherer
Schrittfrequenz
(Schritte pro
Sekunde) einen
höheren
Spulenstrom zu
erhalten,
erhöht man
einfach die
Betriebsspannung,
mit der die
Spulen
betrieben
werden.
Z.B 24 Volt ist ein guter Wert, oder man benutzt einen Halogen-Trafo mit 12 Volt und richtet dessen Wechselspannung gleich und glättet sie. Dann würde der Stromanstieg in den Spulen wesentlich steiler sein und der Motor hätte auch mit höherer Schrittfrequenz eine bessere "Stromausbeute". Aber jetzt
ACHTUNG !Wenn man den Motor mit höherer Spannung betreibt, ist es nun klar ersichtlich, dass diese Spannung viel zu hoch ist, wenn der Motor steht oder sich in niedriger Schrittfrequenz befindet. Die sogenannte "Gegen-EMK" fehlt dann und die Spulen des Motors können durchbrennen. Daher
setzt man nun
den Chopper
ein.
Dazu lesen wir erst einmal den Artikel über den Schmitt-Trigger, um die Voraussetzungen zu verstehen: Schmitt
Trigger mit CD
4093
Wir
haben nun also
verstanden,
dass ein
Schmitt-Trifgger
ein
Schwellwertschalter
ist. Er
arbeitet
normalerweise
mit einer
Hysterese, das
heißt, der
Ausschaltpunkt
und der
Einschaltpunkt
sind
verschieden
von einander.
In unserem Chopper ist ebenfalls ein Schmitt-Trigger eingebaut, jedoch ohne nennenswerte Hysterese. Sobald also der Spulenstrom des Motors einen eingestellten Wert überschreitet, schaltet der im L297 eingebaute Schmitt-Trigger den L298 frei, so dass kein Spulenstrom mehr fließt. Daraufhin baut sich der Strom in der betreffenden Spule über die Dioden wieder ab. Nun aber fällt der Spulenstrom wieder unter die eingestellte Marke und der L297 schaltet den L298 wieder ein. Dies geschieht mit bis zu 20 kHz, also 20000 mal pro Sekunde. Deshalb sind auch schnelle Dioden vorteilhaft. 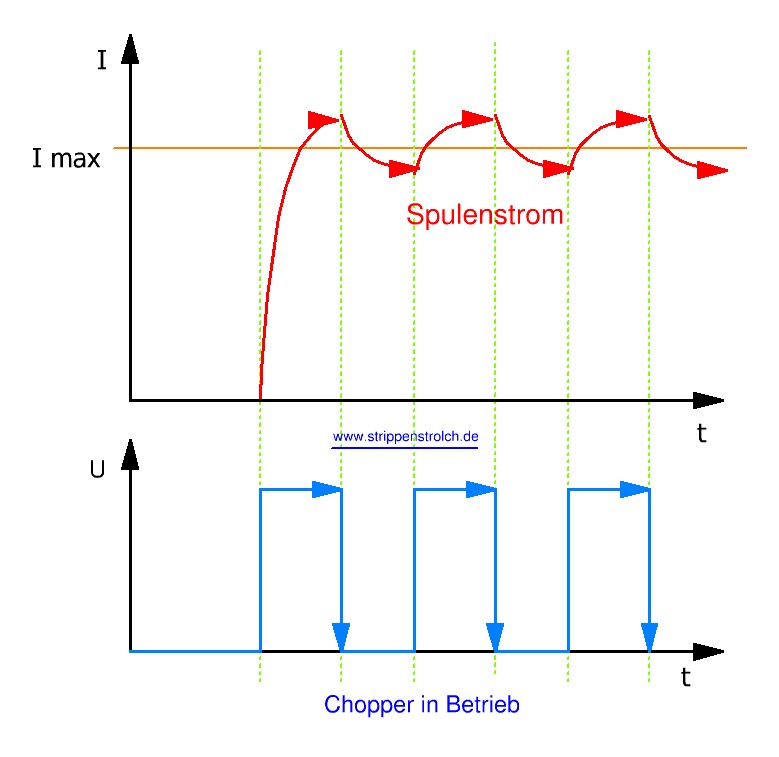 Nun ist gewährleistet, dass der Motor bei Stillstand und und bei langsamer Schrittfrequenz (Drehzahl) nicht zu heiß wird. Der Strom der Spulen wird dann einfach noch an den beiden Sense-Widerständen in eine proportionale Spannung umgewandelt und zurück in den L297 auf den internen Schmitt-Trigger geleitet. Die Schaltschwelle ist dann mit dem Poti P1 (Spindeltrimmer) einstellbar. Diese Stromeinstellung sollte man bei Stillstand des Motors vornehmen. Merke: Bei sehr hohen Drehzahlen wird der Chopper überflüssig, da der maximale Strom sowieso nicht mehr erreicht wird. Der Chopper setzt dann selbsttätig bei niedriger werdenden Drehzahlen wieder ein. Das
kann man am
Motor manchmal
als Pfeif-oder
Zischgeräusch
hören.
Ein
pfeifender,
fiepender oder
zischender
Motor im
Stillstand
besagt also
nur,
dass der Chopper arbeitet und alles in Ordnung ist. 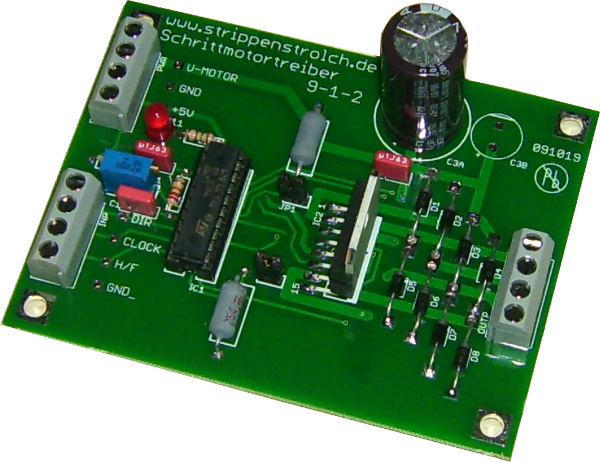 Dies ist ein Beispiel der fertig aufgebauten Platine. Achtung ! Induktion & Abwärme !
 Wenn Du einen Jumper ziehst, oder
den Motor abklemmst, während die Spannung
noch anliegt, kommt es in den Motorspulen
zu hohen Selbstinduktionsspitzen, die den
L298 beschädigen können, da die
Freilaufdioden in diesem Fall nicht
richtig wirken können ! Wenn Du einen Jumper ziehst, oder
den Motor abklemmst, während die Spannung
noch anliegt, kommt es in den Motorspulen
zu hohen Selbstinduktionsspitzen, die den
L298 beschädigen können, da die
Freilaufdioden in diesem Fall nicht
richtig wirken können !
Aktuelles Modell, gestartet am 07.07.2015: 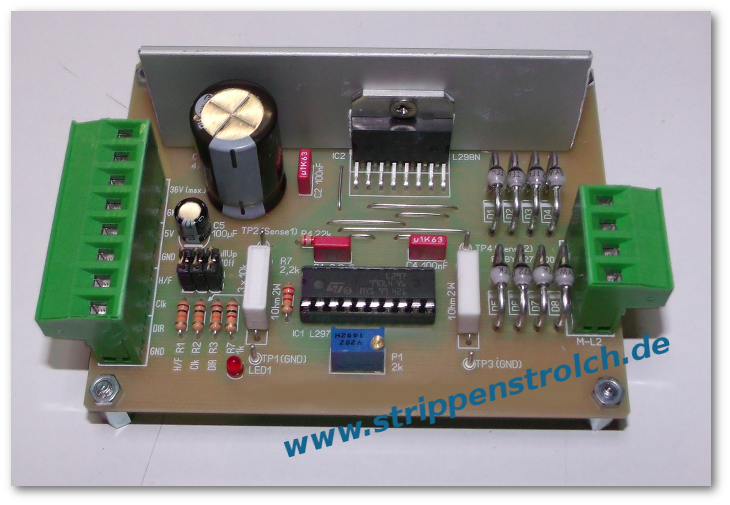 Danke für die Aufmerksamkeit,  |