Zurück zum Menü 5 5.0.0.a Standarfehler vermeiden Erstellt ab: 07.07.2014 |
| Ich wurde
schon oft darauf angesprochen, dass die Picaxe plötzlich
"spinnt", wenn man sie in die Zielapplikation gesteckt
hat: Entweder
die Picaxe läuft gar nicht.
Wenn wir uns einmal eine Standard-Programmierumgebung
für die Picaxe anschauen, so sehen wir, dass der
Programmier-Pin "serin" der Picaxe über einen
Spannungsteiler von 22k und 10k gegen Masse (GND)
geschaltet ist:Die Picaxe zeigt ein völlig wirres Verhalten. Nun, woran mag das liegen ? 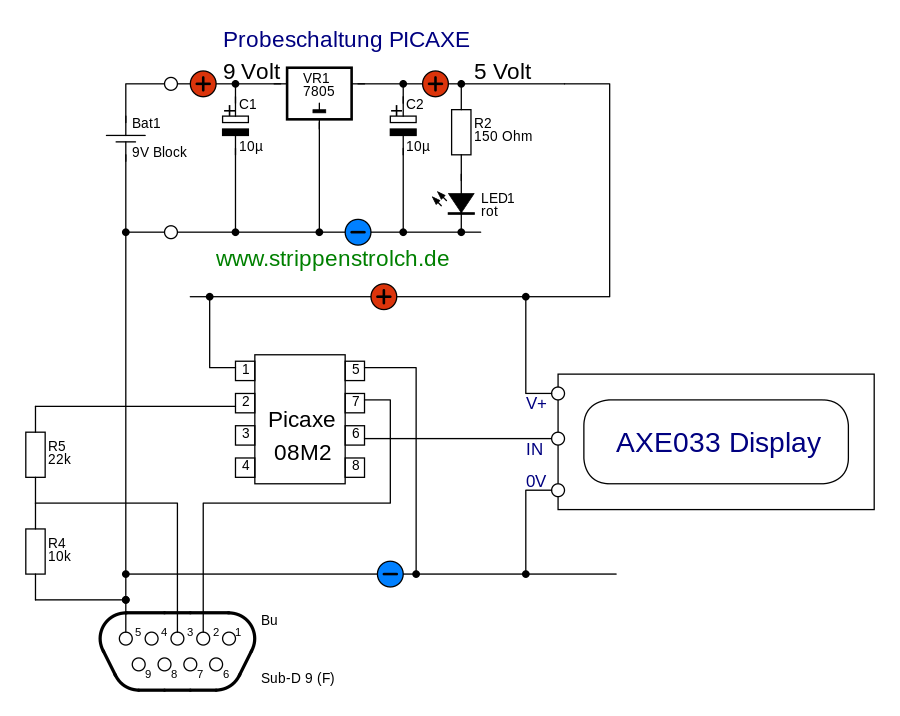 Dieser Spannungsteiler ist nötig, denn das vom PC gelieferte RS232-Signal hat im Original +- 15 Volt. Dieser für die Picaxe viel zu hohe Signalpegel wird durch den Spannungsteiler auf ungefähr 5 Volt herabgesenkt, so dass die Picaxe damit zurechtkommt. Solange die Picaxe jetzt mit dieser Beschaltung betrieben wird, ist alles in Ordnung und der Controller wird auch einwandfrei laufen. Sehr oft
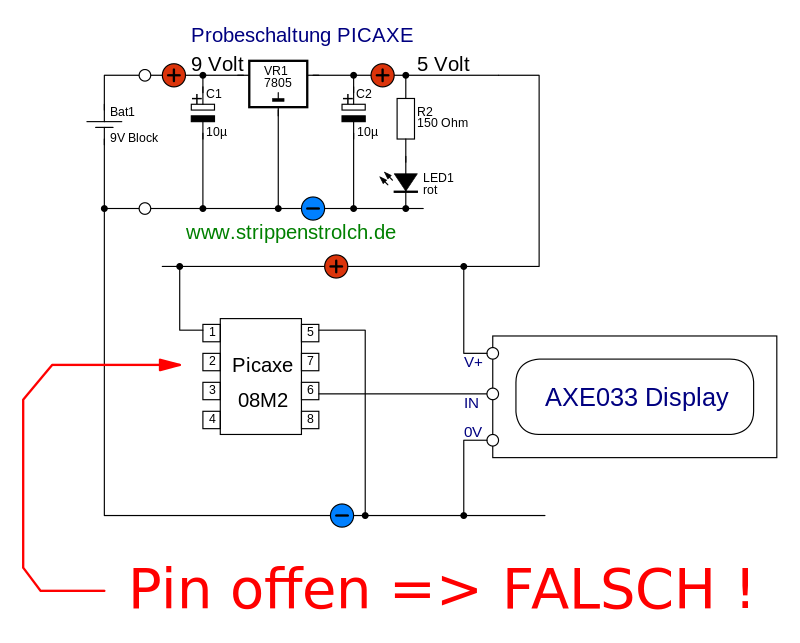
gemachter "Standardfehler":
Jetzt kommen viele Nutzer natürlich auf die Idee, für die eigentliche Zielapplikation eine eigene Platine zu bauen und natürlich (verständlicherweise) werden auf dieser Zielapplikation die beiden Widerstände 10k und 22k weg gelassen. Jetzt aber nimmt das Schicksal seinen Lauf: Da die Eingänge einer Picaxe extrem hochohmig sind, genügt eine geringe Brummspannung, ein Spike auf der Versorgungsleitung, oder auch nur statische Aufladung in der Nähe des Programmierpins, um die Picaxe entweder gar nicht laufen zu lassen, oder ein völlig wirres Verhalten zeigen zu lassen. Hier einmal das Schaltbild, wie man
es NICHT machen
solle:
 Und hier die geeignete Maßnahme, die Brummspannungen, Spikes und Auswirkungen von statischer Aufladung wirkungsvoll unterdrückt: 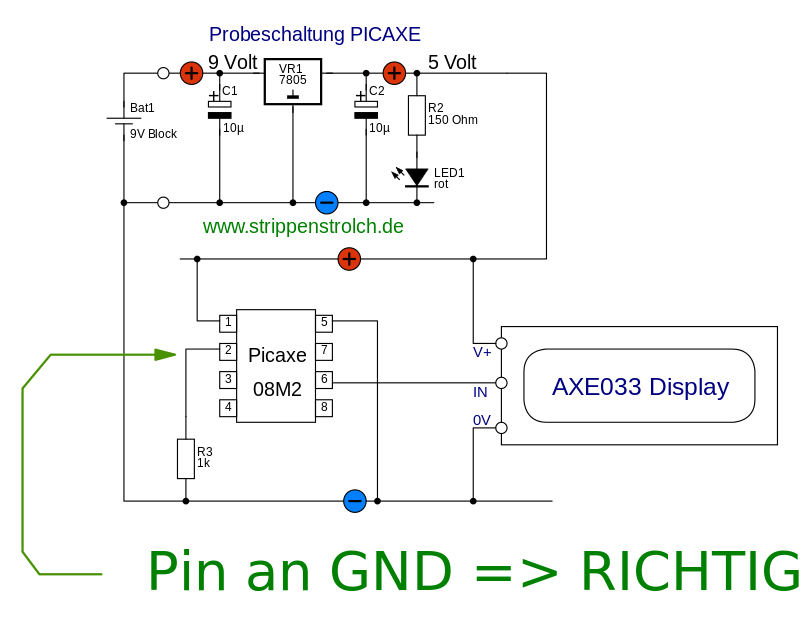 Denn dann sorgt ja der Spannungsteiler von 10k und 22k für die nötige Stabilität.  |
|
|