Zurück zum Menü 1 1.2.18 Schrittmotortreiber L6208N erkunden Erstellt ab: 19.11.2012 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Ich
wandelte heute nahezu ohne Ziel durch das Internet und surfte so vor
mich hin. Da überkam mich die Idee, einmal nach neuen
Schrittmotortreibern Ausschau zu halten. Ich suchte und guckte, aber
entweder war nichts Neues zu sehen, oder aber die Treiber waren doch
allesamt sehr teuer. Klar, ich habe selber einen Treiber im Angebot, aber der war mir noch nicht kompakt genug und der Aufbau des Treibers ist doch noch reichlich zeitaufwändig. Also lenkte ich meine Internetschritte einmal zu Reichelt, um zu schauen, was die denn so anzubieten haben. Und siehe da: Ich wurde fündig:  Es gibt sie also noch,
die gute alte Bauform "DIL".
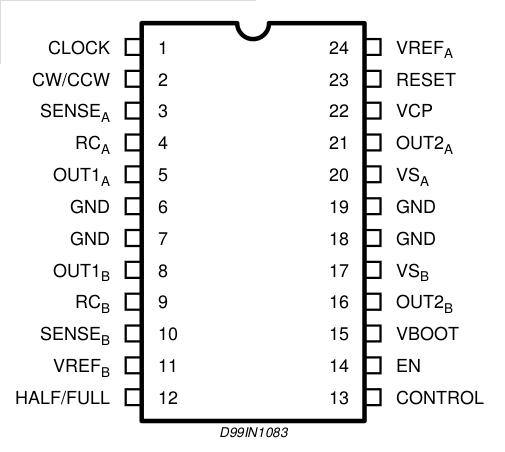
Hier das Pinout des Bausteins:
 Ich habe mich sehr gefreut, sowas noch finden zu dürfen. Der zunächst etwas hoch anmutende Preis wird schnell relativiert, wenn man die Grundschaltung sieht und dabei erkennt, wie wenig weitere Bauteile nötig sind: 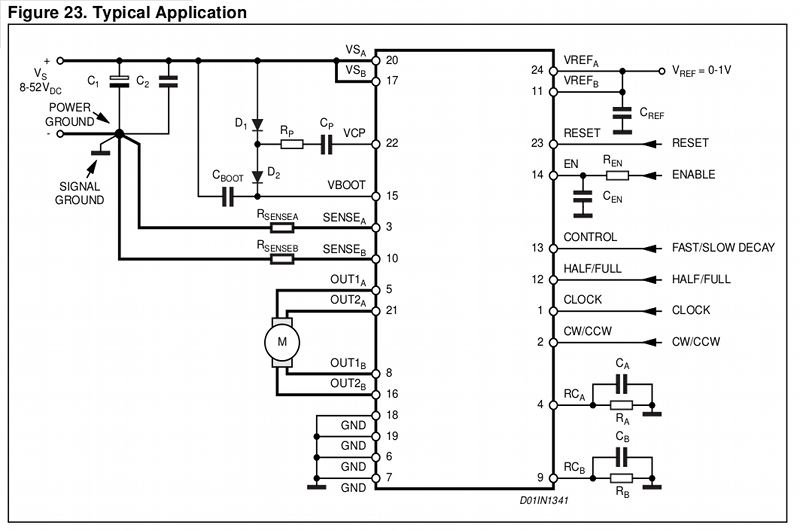 Lediglich ein paar Widerstände und einige Kondensatoren und zwei Standard-Dioden und das wars auch schon an externer Beschaltung. Aber wir wollen hier nicht gleich das Pferd von hinten aufzäumen, sondern der Reihe nach erkunden, wie man mit dem L6208N am besten einen guten Schrittmotortreiber in Bastelqualität und später in Industriequalität herstellen kann. Zunächst betrachten wir uns einmal die elektrischen Daten des Bausteins: 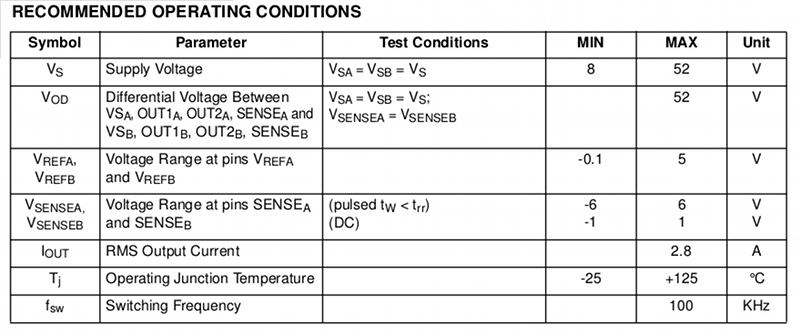 Wir sehen dort nur eine einzige Versorgungsspannung Vs, die zwischen 8 und 52 Volt liegen darf.
Aha ! Da lägen ja die allgemeinen 12 Volt eines alten PC-Netzteils genau in diesem Bereich !
Das ist schön ! Dann sehen wir noch, dass der
maximale Strom pro Schrittmotorspule 2,8 Ampere betragen darf. Das ist
schon recht ordentlich. Ich habe auch in dem Datenblatt noch weiter
"gespickt" und habe dort herausgelesen, dass es bei diesem Baustein
eine automatische Überstrom-Sicherung gibt. Dazu kommen wir aber noch
später. Wir sehen hier auch, dass die für den Chopperbetrieb nötigen
Referenz-Spannungen bis zu 5 Volt betragen dürfen.
Das passt uns gut in den Kram, denn normalerweise wird der Treiber ja mit einem Mikrocontroller angesteuert, der sowieso 5 Volt benötigt. Da könnten wir uns ja über einen Spannungsteiler die 5 Volt anzapfen. Aber auch dazu später mehr. Um einmal die Einfachheit des Chips zu verstehen, habe ich mir jetzt einmal die Mühe gemacht, und die Tabelle von Seite 4 des Datenblatt-PDFs ins Deutsche übersetzt. Das wird unseren Überblick noch einmal erweitern:
So. wir haben jetzt eine ungefähre Ahnung, wie das IC funktioniert.
Natürlich müssen wir uns nun
Gedanken machen, wie wir den Chip
betreiben wollen und welche Pins wir auf ein bestimmtes Potential
festlegen. Ich denke, das IC sollte ständig frei gegeben sein, also
müsste der Pin 14 über einen 10k Widerstand nach Plus geschaltet
werden. Ebenso benötigen wir wohl sehr selten das Reset-Signal. Also
legen wir diesen Pin 23 auf Plus. Was wir mit Pin 13 "Control" anfangen
kann ich jetzt noch nicht sagen, denn dazu sind ein paar Versuche
nötig. Da Bleibt noch der Pin 12 "Half/Full" übrig, der in
Bastelanwendungen ebenfalls so gut wie gar nicht vom µ-Controller
angesteuert wird. Hier bauen wir eine Beschaltung aus einem
Pull-Up-Widerstand und einem Jumper gegen Masse an. Dann kann man
diesen Eingang mit dem Jumper fest vorgeben. Die Pins 24 und 11 belegen
wir mit einer variablen Referenzsspaunnung, die wir mit einem einfachen
2k Trimmer einstellen können.
Den Rest beschalten wir so, wie es im Datenblatt angegeben ist.
Daraus ergibt sich dann dieser erste Versuchsschaltplan:
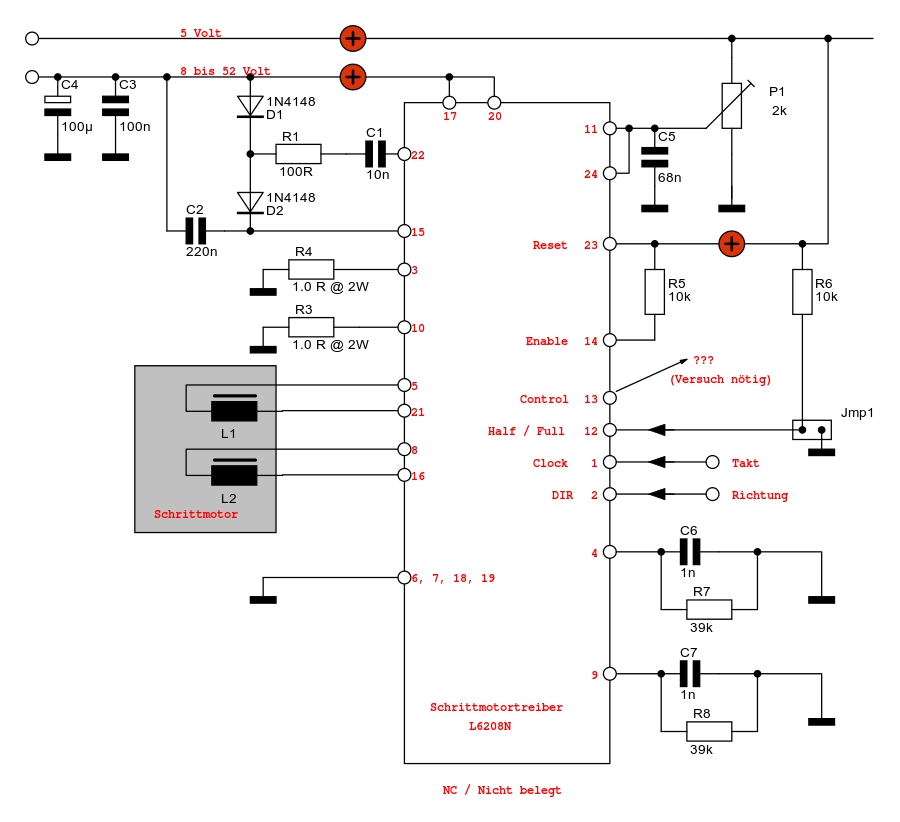 Jetzt kann ich das Steckbrett damit "füttern" und einmal schauen, ob diese Schaltung schon einmal funktioniert. 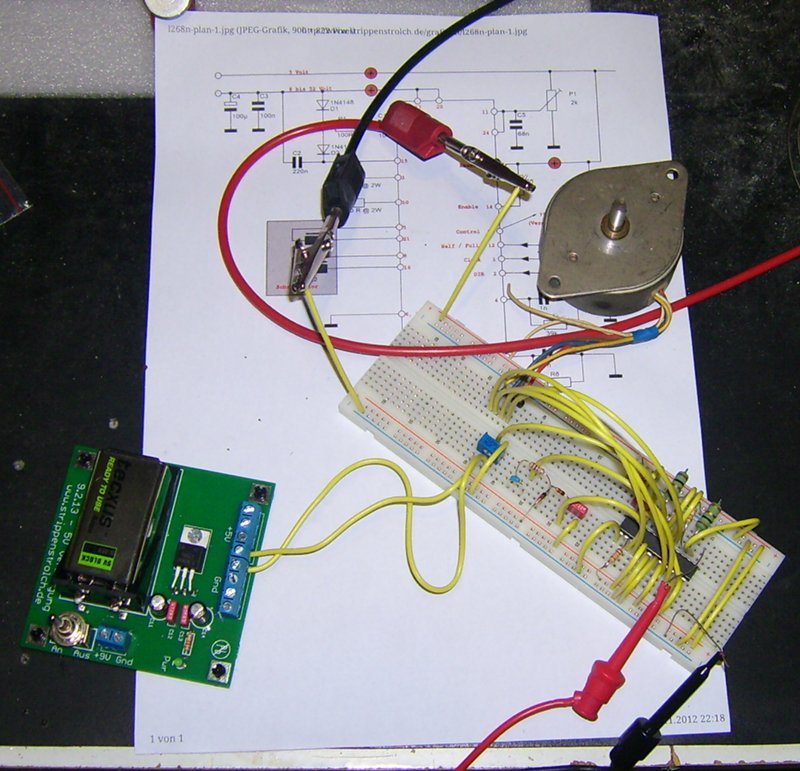 Besonderes Augenmerk müssen wir
noch auf den Eingang "Control", Pin 13, legen. Es ist aus dem
Datenblatt sehr schwer ersichtlich, wozu dieser Pin dient. Es wird aber
deutlich darauf hingewiesen, dass dieser Pin nicht offen sein darf und
entweder mit Plus 5 Volt oder Masse verbunden werden muss. Aber das
werden wir gleich wissen was sich da tut, wenn wir diesen Pin jeweils
mit einem dieser Zustände belegen und einfach ausprobieren. "Was nun, was tun ?"Gesagt, getan: Ich habe die Schaltung gesteckt und gestestet. Der Aufbau war sehr leicht und auch der Pin 13 "Control" war auf dem Massepotential gut aufgehoben. Der abgebildete Schrittmotor lief einwandfrei. Aber nun giung ich dabei und klemmte einen sehr viel größeren Schrittmotor mit 1,7 Ampere Strangstrom an die Schaltung. Zum einen lief der Schrittmotor nicht richtig, aber zum anderen hat das IC L6208N offenbar eine Übertemperatur-Schutzschaltung. Der Motor wurde nach kurzer Zeit abgeschaltet und auch die interne Überstromschutzschaltung sprach sofort an. Der Motor war also für das IC zu groß, bzw. die Impedanz des Motors für das IC zu gering.
Nun probierte ich noch einen anderen Motor mit etwa 1 Ampere Strangstrom aus.
Dabei stellte sich heraus, dass auch hier die umfangreich eingebauten Sicherheitsschaltungen ständig auslösten.  Ok, ich erinnerte mich an das L298-Projekt. Dort habe ich ja den Chopper lahm gelegt, um die ganze Sache bastlerfreundlicher zu machen. Das Gleiche will ich auch einmal hier probieren. Hier nun das abgespeckte Beipsiel für einen Schrittmotor für 12 Volt:
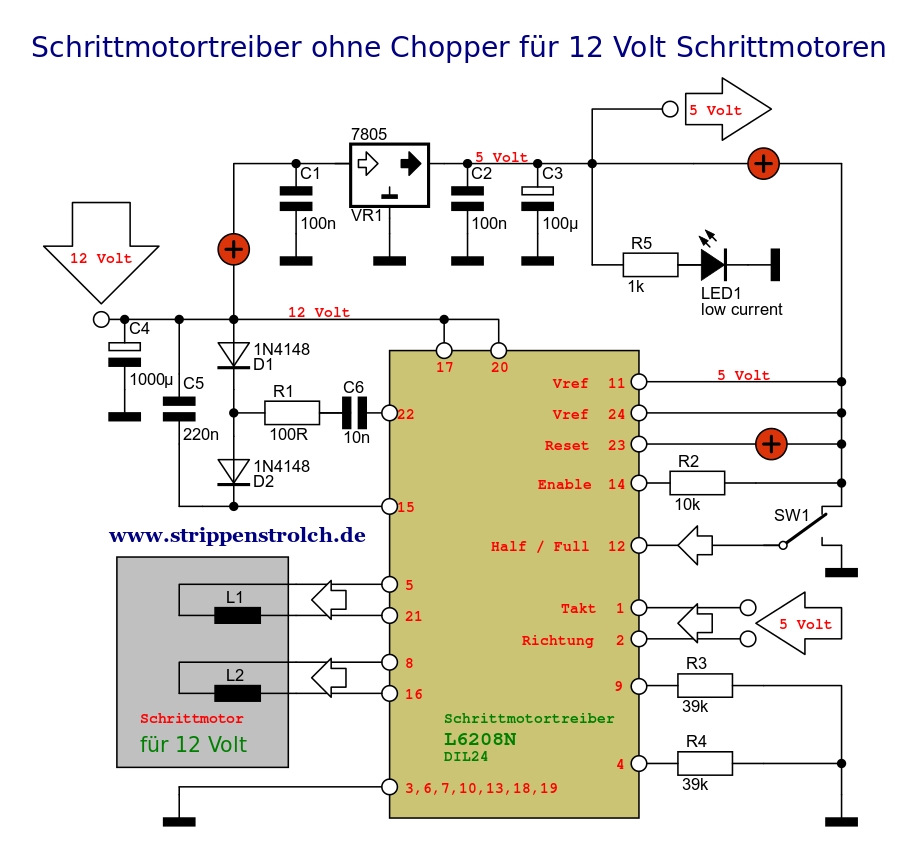 Wie wir sehen, ist die Angelegenheit sehr schön kompakt geworden. Ich steckte diese Schaltung auf mein Steckbrett und sie funktionierte auf Anhieb mit diesem Motor:
 Motor im Pollin-Shop Nun kann ich daran gehen und eine Lochrasterplatine dafür entwerfen.
Fortsetzung folgt. Exclusive Anwendungen und immer gute Schritte wünscht
 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|